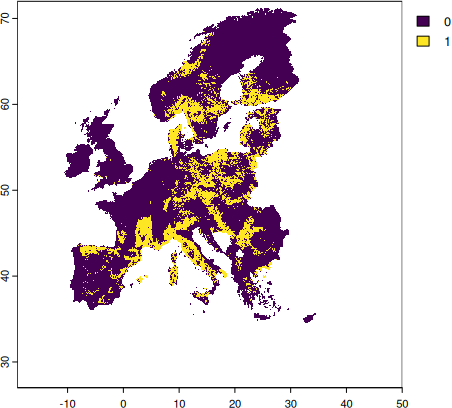
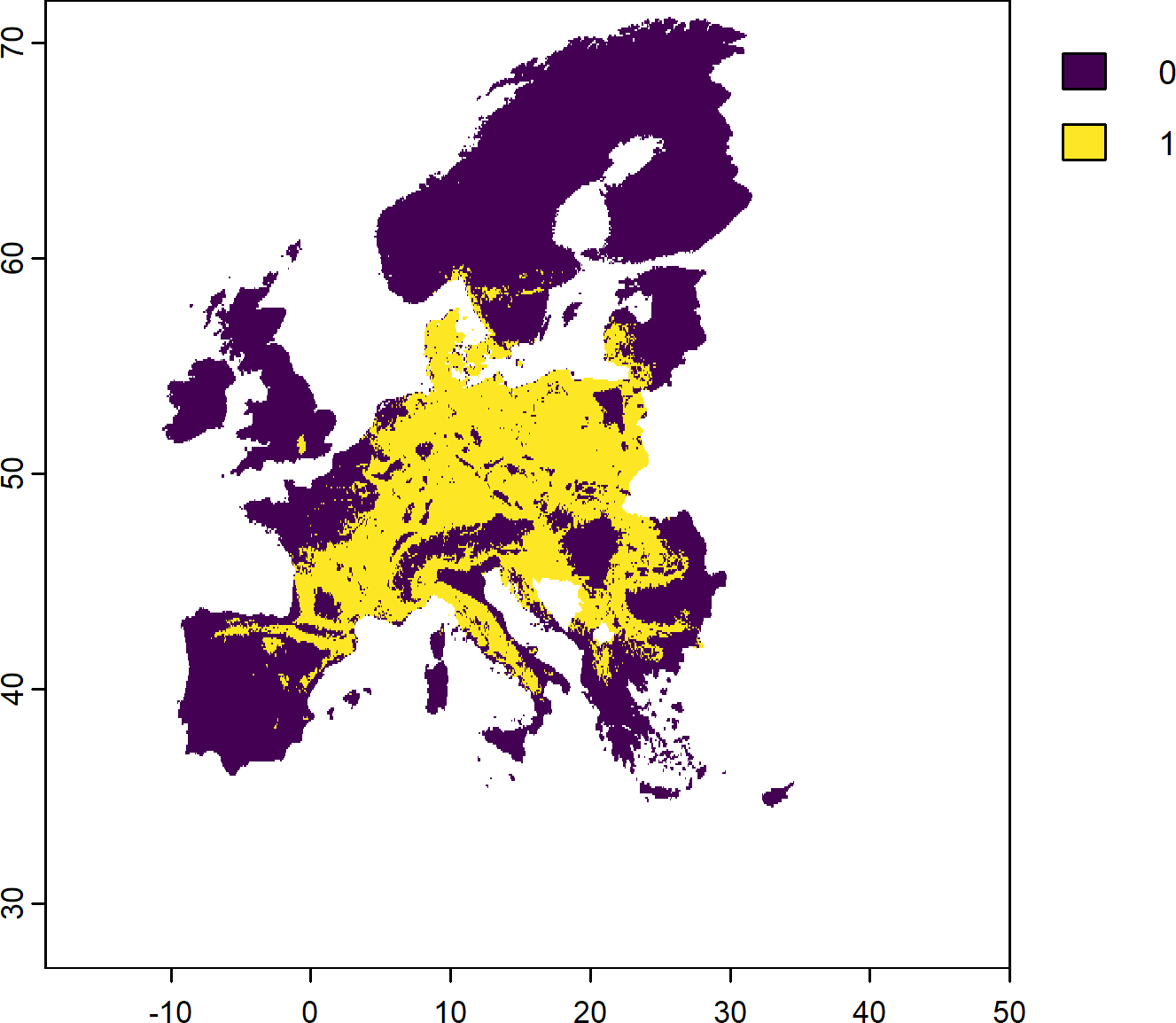
Another objective function without any targets is the maximum coverage objective function. This searches for solutions that represent at least one instance of as many features as possible within a given budget.
Since it does not aim to secure as much as possible, only at least a single PU containing the features, this objective function is usually used for SCP problems where features are highly compartmentalized and a large number of categorical and/or continuous layers is used.
The PU selected in the solution above ensure that each of the 268 features considered (current and future protected species) are covered at least once somewhere in the study region.
Alagador, D. & Cerdeira, J.O. (2020). Revisiting the minimum set cover, the maximal coverage problems and a maximum benefit area selection problem to make climate-change-concerned conservation plans effective. Methods in Ecology and Evolution, 11, 1325–1337.
Arponen, A., Heikkinen, R.K., Thomas, C.D. & Moilanen, A. (2005). The value of biodiversity in reserve selection: Representation, species weighting, and benefit functions. Conservation Biology, 19, 2009–2014.
Ball, I.R., Possingham, H.P. & Watts, M. (2009). Marxan and relatives: Software for spatial conservation prioritisation. Spatial conservation prioritisation: Quantitative methods and computational tools, 14, 185–196.
Beyer, H.L., Dujardin, Y., Watts, M.E. & Possingham, H.P. (2016). Solving conservation planning problems with integer linear programming. Ecological Modelling, 328, 14–22.
Cabeza, M. & Moilanen, A. (2001). Design of reserve networks and the persistence of biodiversity. Trends in ecology & evolution, 16, 242–248.
Jung, M., Arnell, A., De Lamo, X., Garcı́a-Rangel, S., Lewis, M., Mark, J., Merow, C., Miles, L., Ondo, I., Pironon, S. & others. (2021). Areas of global importance for conserving terrestrial biodiversity, carbon and water. Nature Ecology & Evolution, 5, 1499–1509.